
今回はBLHeliを使ったESCの設定について教えてください。
そうだね、このドローン自作講座ではドローン製作に必要なパーツ概要に始まり、パーツの選定、Betaflightの設定と進んできたから、BLHeliやESCチューニングについても説明しないとね。
ドローン自作に関することは、「ドローン製作 ベータフライト設定 完全ガイド」でも詳しく解説しています!
BLHeliによるESCの設定
DSHOTをサポートしたデジタル制御のESCは、BLHeliにてファームウエアアップデートやESC各種チューニング、モーター回転方向変更などを行います。
BLHeliのダウンロード
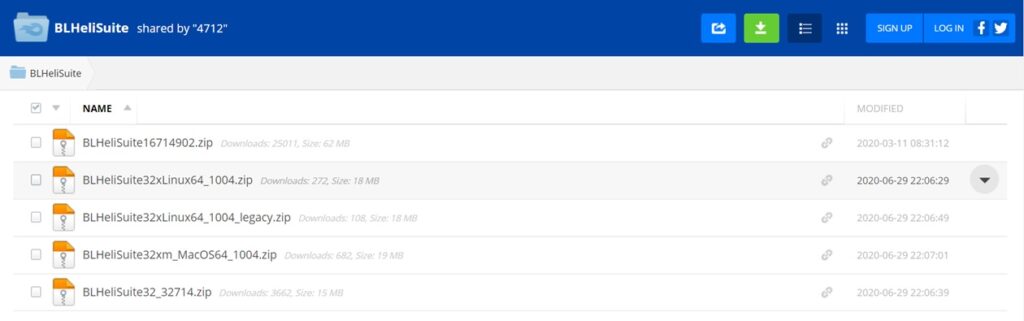
BLHeliはインターネットを検索すれば、すぐにダウンロードサイトを見つけることができると思います。
<https://www.mediafire.com/folder/dx6kfaasyo24l/BLHeliSuite>
ダウンロードサイトを見ると、BLHeli32とBLHeli-Sのふたつがあります。ESCの仕様により、BLHeli32とBLHeli-Sのどちらを使うかを確認できます。仕様を確認した上で、ダウンロードしましょう。
BLHeli32の起動
BLHeli32の起動方法について説明します。
BLHeli32を起動させるためには、まず最初にパソコンとフライトコントローラーをUSBケーブルで繋げます。ドローンの組み立てが完了し、フライトコントローラーとESCが配線されていることが前提となります(ドローン自作に関してはこちらの書籍にも詳しく書かれています)。
パソコンとフライトコントローラーを接続したらBLHeli32を起動させてみましょう。画面上部に[Select BLHeli_32Interface]というメニュータブを確認できると思います。このタブをクリックするとプルダウンメニューが開きますので、[BLHeli32 Bootloader(Betaflight/Cleanflight)]を選択します。
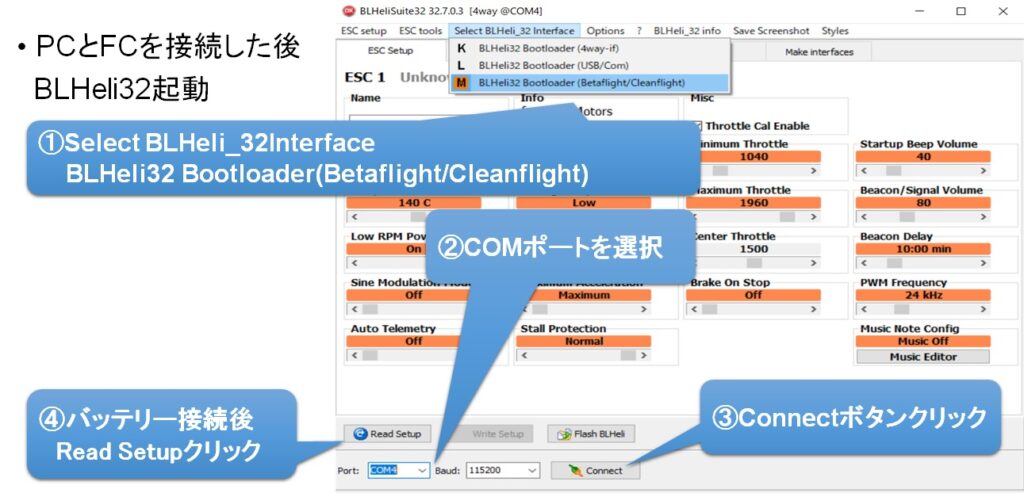
次に対応するCOMポートを選択します。COMポートはパソコン環境により異なりますが、ベータフライトコンフィグレーター画面の接続ボタンのところに表示されているCOMポートと同じ番号となります。
COMポートを選択後、[Connect]をクリックすれば、パソコンとBLHeli32が接続されます。
パソコンとBLHeli32が繋がったら、ESCにバッテリーをつなげ、BLHeli32画面下の[Read Setup]をクリックします。
BLHeli-Sの起動
次にBLHeli-Sの起動手順について説明します。BLHeli-Sの場合も表示は多少異なりますが、BLHeli32とほぼ同様の起動手順となります。
プルダウンメニューより、[BLHeli Bootloader(Cleanflight)]を選択してください(Betaflightを使っている場合でもCleanflightで問題ありません)。
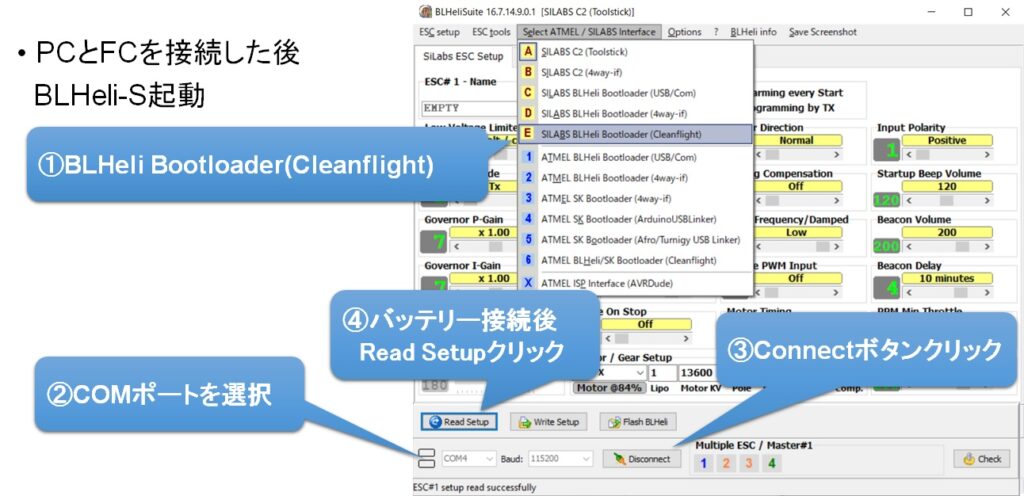
Portから適切なCOMポートを選択し[Connect]をクリックします(COMポートについては、BLHeli32と同様にベータフライトコンフィグレータ画面を確認してください)。
接続後に[Read Setup]をクリックします。
ESC overviewの画面
BLHeliを起動させパソコンとの接続まで成功すると、4つあるESCそれぞれの設定情報を確認することができます。画面上部にいくつかタブが並んでいますが、[ESCoverview]をクリックしてみましょう。
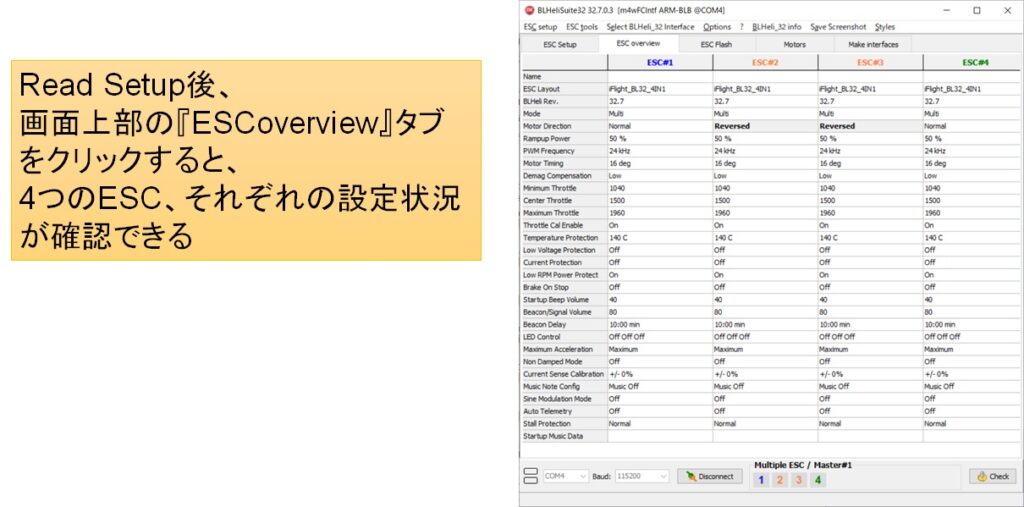
モーターの回転方向の設定については、[MotorDiretion]という項目を確認します。モーター毎にノーマル、またはリバースと表示されています。
ESCのファームウエアアップデート
ESCのファームウエア、アップデートについて、BLHeli32(BLHeli-Sも手順は同様)を例に説明します。ファームウエアのアップデートは[Flash BLHeli]をクリックします。

バージョン選択画面に切り変わるので、プルダウンメニューから最新版のファームウエアを選択します(プルダウンの一番上が最新バージョン)。アップデートするファームウエアの選択が完了したら[OK]ボタンをクリックしましょう。

以上のアップデート手順を進めると、複数あるESCのファームウエアが順番に更新されます。4in1タイプは4つのESCが1つの基盤に格納されていますので、ファームウエア更新は4回行われます。
全てのESC更新が完了後、[ESCoverview]タブにてバージョンが最新版に書き換わっているか確認しておきましょう。

ファームウエアアップデートの注意点
ファームウエアのアップデートに際して、注意しなければならないことがあります。ファームウエアは対象となるESCがBLHeli32に対応しているのか、BLHeli-Sなのかを確認してからアップデートを行います。アベコベにファームウエアをインストールしてしまうとESCが壊れてしまいまい、元の状態に戻すことができなくなります。
モーターの回転方向修正
モーターの回転方向を変更する順を説明します。ベータフライトコンフィグレータのモーターメニューにて、モーターを回転させてみたら本来とは逆回転だったという事があります。その場合、配線をやり直してもいいのですが、ハンダ付けが面倒だという方はBLHeliでの修正をお勧めします。
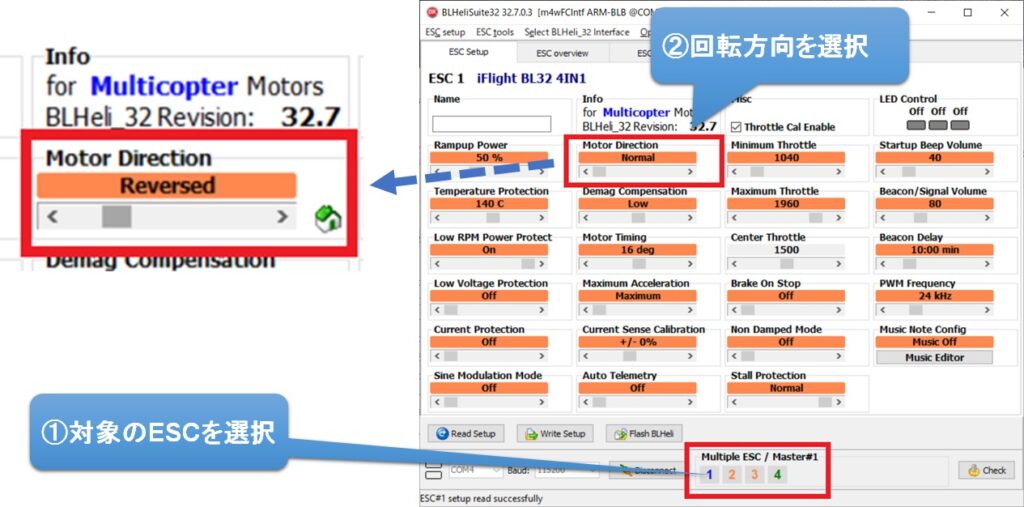
設定画面下部にESCの1から4が表示されていますので、回転方向を修正するモーターが接続されているESCを選択します。選択後にノーマル、またはリバースの変更を行います。この場合、ノーマルとリバースとでどちらが右回転で、どちらが左回転という決まりはありません。最初にリバースとなっていた場合はノーマル、ノーマルとなっていればリバースを選択しましょう。
ESCのチューニング
ESCチューニングについて主だったものを二つ(PWM Frequency、Motor Timing)紹介します。設定は図の赤枠で囲んだ箇所となります。
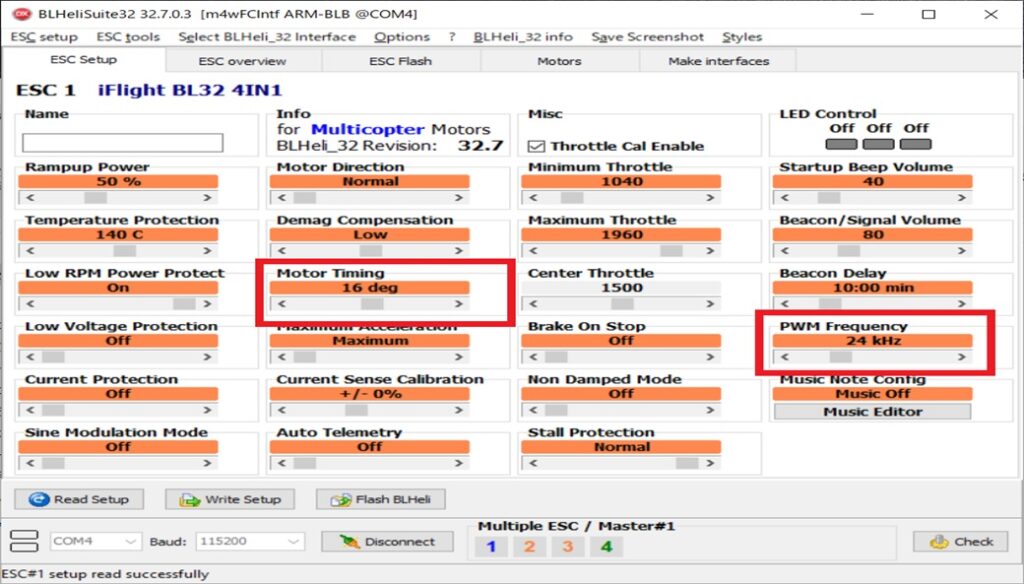
PWM Frequency
[PWM Frequency]はESCによるモーターのコントロール頻度を管理しています。BLHeli32における[PWM Frequency]のデフォルト値は24kHzです。デフォルト値の24kHzより数値を大きくした場合、ドローンはより滑らかに飛行します。飛行が滑らかになり、それに伴いモーターの振動が低減し音も静かになります。モーターの回転数が効率的に変動できるようになるため、発熱量も抑えられます。
ただし、[PWM Frequency]の数値を大きくした場合のマイナス面もあります。電力使用率が上がり燃費(電費)が損なわれます。また、モーターのトルクが多少犠牲になります。
トルクを犠牲にするため、急な方向転換などの飛行能力は低下しますが、スロットル操作はスムーズに感じられるかもしれません。したがって、レースよりはフリーフライトに向いたチューニングといえるのかもしれません。
PWM Frequencyのチューニング
具体的なチューニング方法ですが、実際にドローンを飛行させながら行います。パソコンも必要なので面倒かもしれませんが、48kHzくらいを上限に数値を少しづつ上げながらテストを繰り返してみてください。チェックポイントとしては、飛行の滑らかさと方向転換時の機敏性です。このバランスを確かめながら、好みの数値を探ります。
Motor Timing
[Motor Timing]について説明します。[Motor Timing]は数値を上げるとモーター出力が大きくなります。デフォルト値は16Degです。
設定を変更するに際しては、少しずつ数値を大きくし対象モーターに合った数値を探ります。ただし、20Degを上限にしてもいいかもしれません。あまり数値を上げ過ぎるとモーターがすぐ高温に達してしまいます。場合によってはモーターが焼けて使い物にならなくなることもあります。
適切な数値はモーターにより異なりますので、ドローンを飛行させながら微調整を繰り返します。
Motor Timingの状況に応じた使い分け
[Motor Timing]にはAutoという設定値の選択もあります。Autoにすれば、ESCがスロットルに応じてトルクと回転数の最適なバランスを調整してくれます。個人的な経験でいえば、フリーフライト飛行においてはAutoで十分モーターの能力が引き出されるように思えます。それに対し、プロのレーサーなどはシビアに数値をチューニングしているのかもしれません。
動画でも説明しています
YouTubeチャンネル登録もよろしくお願いします!!
コメント