ドローンの組み立てについて教えてください!!
ドローン自作のための、各種パーツの概要や選定方法については理解できたので、そろそろ組み立て方を知りたくなってきました。
よしわかった。
FPVドローンを対象に組み立て方の説明を進めてみるね。レース機や、アクロバット飛行が得意なフリーフライト用のドローンを自作してみよう。
ドローンの機体にカメラを搭載して、動画を撮影したり、FPV用ゴーグルで飛行中の景色を見ながら操縦することができるタイプですね。
自由な発想でドローンを作ることができるよ。
ドローンには多種多様な飛ばし方、楽しみ方があり、それに応じて自由にカスタマイズしながら製作を進めることができるんだ。機体の大きさも手のひらサイズの小型タイプから、高速で疾走するような大型機まで作ることが出来るよ。
しかも、一度作ったらそれで終わりという訳でもありませんね。実際に飛ばしてみて、必要に応じて改良し、更に高性能なドローンに仕立て上げていく楽しみだってあるということですね。
その通り!!
イメージを大きく膨らませ、自分自身の飛行スタイルに合わせた、世界にひとつだけのドローンを作ってみましょう。
フレームへのESC固定
 ESCをネジでフレームへ固定するときは、ESCとフレームの向きを合わせる必要があります。向きを合わせないとESCが制御するモーターが本来とは違う位置に配線されてしまうからです。ドローンのモーターは4つが標準的ですが、飛ばす方向により各モーターの回転を上げたり、下げたりしなければなりません。適切なモーターのコントロールを行うために、フレームとESCの向きを一致させ、そこにつながるモーターを正しく接続する必要があります。
ESCをネジでフレームへ固定するときは、ESCとフレームの向きを合わせる必要があります。向きを合わせないとESCが制御するモーターが本来とは違う位置に配線されてしまうからです。ドローンのモーターは4つが標準的ですが、飛ばす方向により各モーターの回転を上げたり、下げたりしなければなりません。適切なモーターのコントロールを行うために、フレームとESCの向きを一致させ、そこにつながるモーターを正しく接続する必要があります。
 4in1タイプのESCは設置方向が決まっています。ESCの基盤に矢印などで方向が表記されています。矢印などの向き表示が見つからない場合は、モーター取付箇所で確認することもできます。
4in1タイプのESCは設置方向が決まっています。ESCの基盤に矢印などで方向が表記されています。矢印などの向き表示が見つからない場合は、モーター取付箇所で確認することもできます。
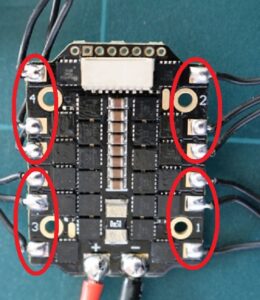
ESCへの4つのモーターの取り付け場所が予め決まっています。ドローンの機体後方を自分自身に向けてテーブルへ置き「①右後方」・「②右前方」・「③左後方」・「④左前方」がESCへモーターを繋ぐ際の番号となります。基盤にこの番号が刻印されているので、それをみればESCの向きを確認できます。番号の表記は製品により異なる場合もありますが「1/2/3/4」や「M1/M2/M3/M4」となっている場合が多いと思います。
M2:左前方
M3:右手前
M4:右前方
フレーム形状や配線等の関係でESCの向きをフレームの向きと一致されることが出来ない場合もあります。そのときはBetaFlightの設定で向きの修正が可能です(Betaflightの設定については、こちらの書籍にて詳しく説明しています)。
- ESC基盤に矢印などで設置方向が表記されている
- モーター取り付け端子でも向きが確認できる(M1/M2/M3/M4)
- 形状や配線の影響でESCとフレームの向きを合わせることが出来ない時は、あとからBetaflightで修正可能
モーターの配線
 モーターはESCへハンダ付け、またはコネクタで接続します(ハンダ付けなのか、コネクタ接続なのかはなのかは部品毎に異なります)。
モーターはESCへハンダ付け、またはコネクタで接続します(ハンダ付けなのか、コネクタ接続なのかはなのかは部品毎に異なります)。
ESCには4つのモーター取付箇所があり、それぞれに3つずつ端子があります。ブラシレスモーターを前提に説明しますが、モーター毎に3本の配線があり、それをESC側の3つの端子に接続します。
ESC側には前述のとおりM1/M2/M3/M4の表記がありますが、それぞれに接続されたモーターはフレームの正しいアームに取り付けます。
- モーター毎に3本の配線がある
- ESC基盤のM1~M4に各3つずつ端子がある
- モーターの3本のケーブルをESCのM1~M4へ配線する
- ESCのM1~M4 の位置とモーターをフレームに取り付ける位置を合わせる(例えばM1の位置にあるモーターをM4に繋ぐのはNG)
モーターのフレームへの固定
モーターをフレームに固定する場合、5インチクラスの機体であればネジ穴はM3となります。3インチ以下のサイズなら一般的にM2となります。M3やM2というのはネジの直径で、それぞれ3ミリ、5ミリという意味です。サイズに見合ったネジを用意しモーターをフレームに固定しましょう。
モーターの振動低減
 モーターの回転振動をフレーム側へ出来る限り伝えないようにしたほうが、ドローンの飛行が安定します。モーターの振動をジャイロセンサーが拾えば、それが余計なノイズとなり誤動作や不安定飛行につながります。振動を減らすために対策として、シリコンリングなどの緩衝材をネジにはめ込みワッシャー代わりに使います。
モーターの回転振動をフレーム側へ出来る限り伝えないようにしたほうが、ドローンの飛行が安定します。モーターの振動をジャイロセンサーが拾えば、それが余計なノイズとなり誤動作や不安定飛行につながります。振動を減らすために対策として、シリコンリングなどの緩衝材をネジにはめ込みワッシャー代わりに使います。
配線長は必要最小限で
ドローンのフレーム上にはたくさんのパーツを組み込みますが、底面積にしても高さにしてもスペースに余裕は全くありません。必要なものをギリギリのスペースに組み込む必要があります。さらに、各パーツの発する熱を効率よく排熱させなければなりません。廃熱クリアランスを確保しつつ、限られたフレームスペースを効率よく使いパーツ同士を配線します。
まず仮止めでモーターをフレームに固定して、モーターの配線長がどれだけ必要かを確認します。配線長はできる限り短くしたほうが出来上がり来上がりの見栄えが良くなり、また重さを最小限に抑えることができます。空を飛ぶドローンはグラム単位の違いが飛行の差となり現れます。そのため、たかが配線と思わずに必要最小限の長さにカットし、モーターからのケーブルをESCへへ接続しましょう。
ESCへバッテリー接続用ケーブルを配線
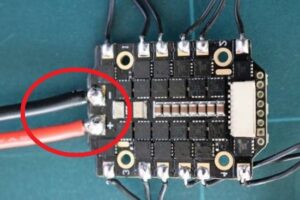 ESCへバッテリー接続用のコネクタ付きケーブルをハンダ付けします。4in1タイプのESCにはバッテリーを繋ぐプラスとマイナスの端子が基盤にあります。赤い配線ケーブルをプラス、黒いケーブルはマイナスにハンダ付けしてください。
ESCへバッテリー接続用のコネクタ付きケーブルをハンダ付けします。4in1タイプのESCにはバッテリーを繋ぐプラスとマイナスの端子が基盤にあります。赤い配線ケーブルをプラス、黒いケーブルはマイナスにハンダ付けしてください。
配線ケーブルの太さは、目安として12AWG~18AWGの芯線径を使います。または、バッテリー側ケーブルの太さに合わせます。
コネクタはバッテリー側と合わせますが、XT60・XT30、JSTなどとなります。ESC側のバッテリー接続用コネクタはオスです。
バッテリー側のコネクタはメスとなります。理由としては、オスにしてしまうとプラスマイナスをショートさせてしまう危険性がありがあるからです。バッテリーはショートさせないよう気をつけましょう。リポバッテリーは瞬間的にでもプラスマイナスをショートさせてしまうと膨らみ始め、発熱・発火します。
- バッテリー側コネクタと同じ種類のオスのコネクタを準備
- コネクタ( オス)へシリコンケーブルをハンダ付け
- 赤いケーブルをプラス、黒いケーブルはマイナスにハンダ付け
- シリコンケーブルは12AWG~18AWG程度の太さを用いる
- 3~4 セルバッテリーを繋ぐのであれば16AWG程度の太さを用いる/2セル程度であれば18AWG
- ESC 基盤のバッテリー端子へバッテリー接続用コネクタ付きケーブルをハンダ付け
コンデンサの役割
バッテリーから常に安定した電流が流れていればそれに越したことはありませんが、バッテリーからの電流には変動があり安定していません。そのためバッテリーからの給電が瞬間的に少なくなった場合に備え、コンデンサに蓄電された電流がESCやフライトコントローラーに流れ不足分を補ってくれます。飛行中のドローンへの給電がが不安定になってしまっては大変ですよね。
また、バッテリーを繋いだ際に突入電流という非常に大きな電圧・電流がフライトコントローラーなどの基盤に流れ込み、電子機器にダメージを与えてしまうことがあります。そうしたダメージから、各種パーツを保護する役割もコンデンサにはあります。
更にコンデンサはノイズ対策にも役立ちます。ノイズはFPVカメラの映像を乱したり、ジャイロセンサーの制御を狂わせモーターの異常回転・墜落の原因にもなります。
コンデンサの種類
ドローンにはLowESRタイプのコンデンサを用います。
コンデンサの極性判別方法
 コンデンサにはプラスとマイナスの端子があります。しっかり確認した上で接続します。もし、反対に繋がってしまった場合は破裂してしまいますので、怪我や火事を起こさないように確実なチェックが必要です。
コンデンサにはプラスとマイナスの端子があります。しっかり確認した上で接続します。もし、反対に繋がってしまった場合は破裂してしまいますので、怪我や火事を起こさないように確実なチェックが必要です。
- リード線の長い方がプラス
- リード線の短い方がマイナス
円筒形のコンデンサ本体にマイナス表示がされていて、そこからマイナスのリード線が出ているタイプのコンデンサもあります。
コンデンサの接続
コンデンサの接続はバッテリーに近い場所であるほど効果的です。バッテリーのコネクタ部分へハンダ付け、またはESCのバッテリー端子にバッテリー用配線ケーブルと共にハンダ付けします。
- コンデンサ取付はバッテリーに近いほど効果的
- バッテリーコネクタへハンダ付け
- ESCやPDB基盤のバッテリー端子にハンダ付け
ドローン自作に関することは、「ドローン製作 ベータフライト設定 完全ガイド」でも詳しく解説しています!
動画でも説明しています
YouTubeチャンネル登録もよろしくお願いします
コメント