
今回は基本設定タブの後編ですね。
前回はジャイロ演算周波数とPIDループ演算周波数だったから、今回は残りの設定項目について説明するね。
基本設定タブを開いてみましょう
コンフィグレーターの画面左側に基本設定という項目があるので、クリックしてみてください。基本設定画面が表示されましたでしょうか。左上にドローンの簡略図面が表示され、左右2列に設定項目が並んでいると思います。
ミキサー

ミキサーの設定から説明します。
ドローンの図があり、その右横にプルダウンメニューがあります。プルダウンを開いてみると様々なドローンの形状が表示されます。ドローンは4つのプロペラが前後・左右伸びているものがよく見かける形状です。プロペラが4つでも、斜めにアームが伸びているタイプや、アームが縦横方向に延びているタイプもあります。プロペラの数も4つだけではなく、3つのものや5つ以上のものなど様々な形状があります。
このミキサーのプルダウンメニューから、設定しようとしているドローンの形状を選択しましょう。一般的なドローン機体であればデフォルトのQuad Xです。
加速度センサー
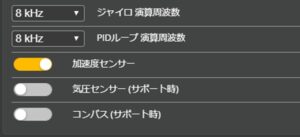 PIDループ演算周波数の下に加速度センサーの項目があります。加速度センサーは有効に設定しましょう。
PIDループ演算周波数の下に加速度センサーの項目があります。加速度センサーは有効に設定しましょう。
無効にしてしまうとアングルモードとホライズンモードは使用できなくなります。また、セットアップタブにある3Dモデルも動作を停止します。
個人用設定_機体名

ここは任意設定で構わないのですが、機体名称やアマチュア無線の免許証に記載されている「コールサイン」など、ユニークな識別情報を記入しましょう。機体名の欄へ入力する名称がOSD表示されます。
もちろん、自分のFPVゴーグルやモニターのみならず、周囲の人もバンドやチャネルを合わせることで機体名情報が確認できます(ドローンレースを観戦している方々など)。
受信機
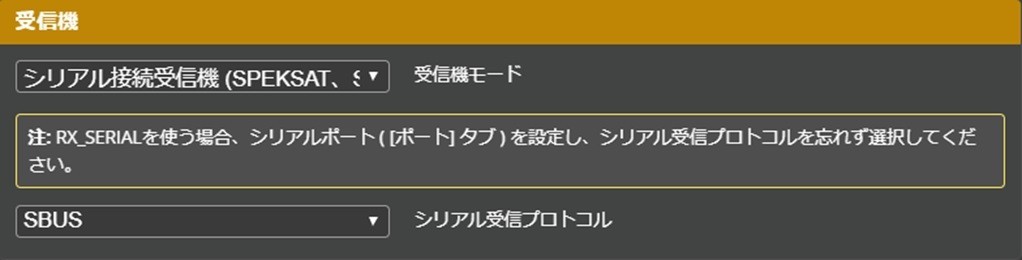
使用する受信機に合わせて、プルダウンから通信方式やプロトコルを選択します。スペクトラム拡散方式やS.BUSなどのプロトコルについては、「送信機とは」や「受信機とは」で説明してますので、ご参照ください。
DSHOTビーコン設定

DSHOTビーコンはモーターのボイス機能により各種アラームを鳴らすための設定です。例えば、草むらなど探しずらいところにドローンが墜落してしまったときに、音が鳴っていれば見つけやすくなります。このような場合のアラームとしては、DSHOTビーコン設定によりモーターから音を鳴らす方法と、フライトコントローラーにつなげたブザーを鳴らす方法があります。
DSHOTビーコン設定では、モーターのボイスコイルを利用してビープ音を鳴らします。もちろん、モーターのボイスコイル音とブザーの二つを同時に鳴らすというやり方も可能です。クラッシュしたショックで、仮にフライトコントローラーに取り付けたブザーが鳴らなくなったとしても、モーターから音が出ていれば助かりますよね。
ただし、Betaflight3.1よりも以前のバージョンでは、DSHOTビーコン設定の設定は対応していません。
ビーコントーン
DSHOTビーコン設定の項目に、ビーコントーンがあります。この設定はBetaflight4.0から加わりました。ビーコントーンでは、モータービープ音のボリューム調整ができます。プルダウンでボリュームレベルを選択しますが、数字が大きくなるほど音が大きくなります。
RX_LOST
RX_LOSTの項目は、送信機と受信機間の信号が途絶えたときにビープ音を鳴らすための設定です。
設定する人の考え方次第ということにはなりますが、モーターの過熱を考えるとRX_LOSTの設定はオフにするほうがいいかもしれません。送信機からの操作信号が途絶えるほど遠くに機体が飛んで行ったときに、いくらアラームを鳴らし続けてもビープ音は聞こえません。むしろモーターが過熱してしまいます。モーターからのビープ音を長時間鳴らし続けると、モーターが熱を持ち焼けて使えなくなることもあり得ます。そのため、フライトコントローラーにつけたブザーを鳴らし、ビーコントーンの方は鳴らさないような設定も、選択肢としてはあり得るかと思います。アラームはブザーに任せ、モーターには出来るだけ負荷をかけないことも大切です。
RX_SET
RX_SETを有効にすると、送信機のスイッチ操作でモータービープ音を鳴らすことができます。これを行うためには、同時にモードタブのBeeper設定も有効にします。
CLIコでのビーコントーンの設定
CLIコマンドラインタブからもビーコン設定ができるので参考までにお伝えします。
数字の部分がボリュームレベルで、0から5までの設定が出来ます。ゼロは音を鳴らさない、1から5は、ディーショットビーコンの画面設定と同様に数字が大きいほどボリュームが上がります。
ESC/モーター機能
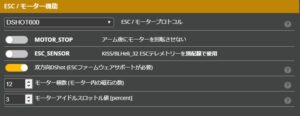
ESCがサポートしているプロトコルを設定します。
プルダウンメニューよりONESHOTやMULTISHOT、DSHOTなどのプロトコルを選択します。
- ESCがBLHeli-S(ファームウエア)で動作するならプロトコルはDSHTO300や600
- BLHeli-32ならDSHOT1200
また、ONESHOTやMULTISHOTを選択した場合は「PIDからモーターPWMを分離」の設定項目が下段に表示されます
PIDからモーターPWMを分離

ESCモータープロトコルのプルダウンからONESHOTやMULTISHOTなどのアナログのプロトコルを選択した場合、「PIDからモーターPWMを分離」の設定項目が表示されます。ここは、PIDループ演算周波数で設定したPID計算速度(4kHzや8kHz など)と、ESCによるモーター制御を同期させるか否かを決める設定です。設定を有効に設定すればPIDと非同期でESCがモーターを制御する状態になります。
最小/最大スロットル値、スティック最小値
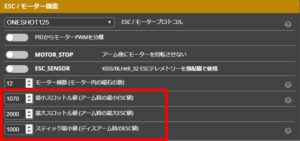
ESCモータープロトコルのプルダウンからONESHOTやMULTISHOTを選択した場合、最大スロットル値/最小スロットル値/スティック最小値の欄が表示されます。
受信機タブにて設定するスティックレンジに合わせ、最大スロットル値は2000、スティック最小値は1000と設定します。最少スロットル値はモータータブにてモーターが回転し始める値を確認し、それと同じ値を設定しましょう。
MOTOR_STOP
MOTOR_STOPを有効に設定するとアーム(モーターロック解除)してもモーターは回転しません。モーターは回りませんがモーターロック自体は解除されている状態です。
MOTOR_STOPは無効にすることをお勧めします。MOTOR_STOPを無効に設定することで、モーターが回転しアームしていることを判別することができます。
ドローンはアーム(モーターロック解除)した時点で、通常はモーターがアイドリング回転を始めます。MOTOR_STOPを無効にすれば、アームした際にモーターが動いてくれますから、いつでも飛べることを確認できます。
- MOTOR_STOPが無効なら、アーム時にモーターがアイドリング回転する
- MOTOR_STOPが有効なら、アーム時にモーターはアイドリング回転しない
また、MOTOR_STOPを有効にした場合は、送信機スロットルを一番下まで下げた時もモーター回転が止まります。飛行中にモーターが止まれば、ジャイロセンサーやPID制御が効かなくなり、飛行中の機体がバランスを失い落下してしまいます。
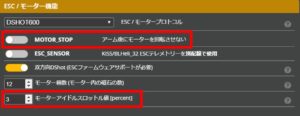
モーターアイドルスロット値
モーターアイドルスロット値の項目では、アイドリング時の回転数をパーセントで設定します。デフォルト値のままで問題ないと思いますが、変更するときはモーターが回転しているのを確認できる程度の小さな数値にしておきましょう。あまり大きな値にするとモーターが急激に回転を始め、勝手に思わぬ方向へ飛んで行ってしまいます。怪我をしない程度の回転数に設定しましょう。
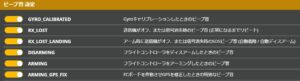
ビープ音設定
ビープ音設定では、どのような時にアラーム音を鳴らすかを決めます。コンフィグレータ画面上にも、「●●したときのビープ音」といった説明が書かれていますので、必要に応じてアラーム鳴動の選択をしましょう。
FCボード&センサーアライメント
フレームへのフライトコントローラー取り付け時に、配線取り回し等の関係などの理由でフライトコントローラーを本来の方向通りに設置できないことがあります。このような時に、FCボード&センサーアライメントにて向きを修正します。

例えば90度向きを変えてフライトコントローラーが取り付けられている場合は、FCボード&センサーアライメントにて90度本来の方向へ修正します。横向きだけではなく、縦方向の回転も調整できます。
- フライトコントローラーの設置向きを正しい方向へ修正するための調整
- ロール軸、ピッチ軸、ヨー軸方向の調整ができる(横方向、縦方向)
- 90度向きを変えて設置した場合は、90度分を本来向くべき方向へ調整
アーム最大角
アーム最大角の項目で設定した角度以上に機体が傾いていると、アームが出来なくなります。ドローンを離陸させようとする時に、もし機体が極端に傾いていると周りにいる人や、自分自身に向かって飛んでくる可能性があり非常に危険です。アーム最大角を水平に近い角度で設定しておけば、アームさせて思わぬ方向へ飛んで行ってしまうようなリスクを低減させることができます。

または上記とは別の考え方もできます。例えばドローンが木の枝に引っかかり、機体が縦に向いているときなど、プロペラを少し回転させれば枝から外れてくれるかもしれませんよね。そうしたケースでドローンがアームできないと、木登りするしかなくなってしまいま。でも、アーム最大角が90度以上に設定されていればプロペラを回せます。
それと、フリップオーバーアフタークラッシュ(タートルモード)という機能を有効にする場合には、アーム最大角の設定値を180とします。フリップオーバーアフタークラッシュはドローンが墜落し仰向けになってしまった際に、送信機のスティック操作で簡単に正常な向きに機体をひっくり返すことができる機能です。
- アーム最外角を小さな値に設定:ドローンが思わぬ方向に飛び立つリスクを低減
- アーム最大角を大きな値に設定:木の枝などからドローンが外れなくなった場合、アーム最大角が大きければプロペラを回し抜け出すことが可能/フリップオーバーアフタークラッシュの機能が使える
その他機能
 その他機能という項目があります。各項目には説明が書いているので、必要に応じ有効にしましょう。特にTELEMETRY/AIRMODE/OSD/ANTI_GRAVITY/DAYNAMIC_FILTERは重要な項目です。
その他機能という項目があります。各項目には説明が書いているので、必要に応じ有効にしましょう。特にTELEMETRY/AIRMODE/OSD/ANTI_GRAVITY/DAYNAMIC_FILTERは重要な項目です。
TELEMETRYとDAYNAMIC_FILTER設定は、フィルターについて理解しないと判断が難しいため、別途記事でお伝えします。
OSD
OSDはFPVゴーグルを使った飛行を行う際、ゴーグル画面にバッテリー残量や飛行時間などの情報を映し出す機能です。ここはオンにしておきましょう。
AIRMODE(エアモード)
モードタブでもAIRMODEの設定は可能です。モードタブでの設定では、送信機に割り当てられたスイッチをオンにした場合のみAIRMODEを有効にします。
- AIRMODEを有効にすれば、スロットルを下げきっても機体姿勢が適正に保持される(プロペラが回転しジャイロ機能が働き続ける)
- AIRMODEを有効にする場合、MOTOR_STOPは無効にする(モーター回転をストップさせない)
ANTI GRAVITY(アンチグラビティ)
ANTI GRAVITYはドローンを上昇させているときに瞬間的にスロットルを下げても、機体が沈み込まないようにするための機能です。
スロットルを上げ下げする操作をしたときに、複数あるモーターが同じ割合で回転速度を速めたり遅くできるとは限りません。モーターの個体差やプロペラのダメージ具合によって個々の回転に差が出ます。それを補う働きをするのがANTI GRAVITYです。
ドローン自作に関することは、「ドローン製作 ベータフライト設定 完全ガイド」でも詳しく解説しています!
動画でも説明しています
YouTubeチャンネル登録もよろしくお願いします!!
コメント